{kind=link}

Most recently, I spent a few months contributing to the Open Forest Observatory, which makes open source code to enable easier forest management. This was a great learning experience, touching on a wide variety of tools and data, from georeferenced orthomosaics to NeRF reconstruction to equirectangular GoPro images.
I spent nearly two years at Fyto working on control and perception for large-scale crop robots harvesting a new type of sustainable, high-protein crop. Contributing to a sustainable agricultural project was incredibly rewarding, and I hope to return to this field in the future.
I completed a two-year master’s program at the Robotics Institute at Carnegie Mellon University (CMU MSR). I worked in the Field Robotics Center with George Kantor on agricultural robotics applications, focusing on outdoor imaging and reconstruction.
Prior to CMU, I spent six years at RightHand Robotics, a Boston area startup focused on piece-picking automation. It was a privilege to watch this startup grow up, as well as a great learning experience.
I’m interested in making useful work happen with computer vision. I believe nearly every robotics problem has perception at its core, and all of the downstream actions taken by the robot rely on a good assessment of the world around it. While at CMU I did my best to dive into imaging, machine learning for image processing, and 3D reconstruction.
Projects
Here is a collection of past projects that I have documentation for, some serious and some fun.
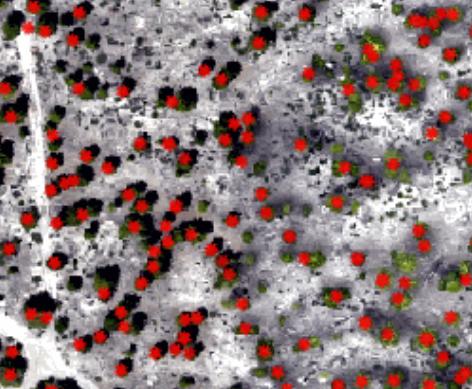 |
Drone Forestry Worked on an open-source drone forestry project, turning images into 3D forest reconstructions |
 |
Fyto Worked at this sustainable agriculture robotics company for two years |
 |
Mass Flow Estimation Took data and trained a series of ML models to estimate the mass of flowing plant material |
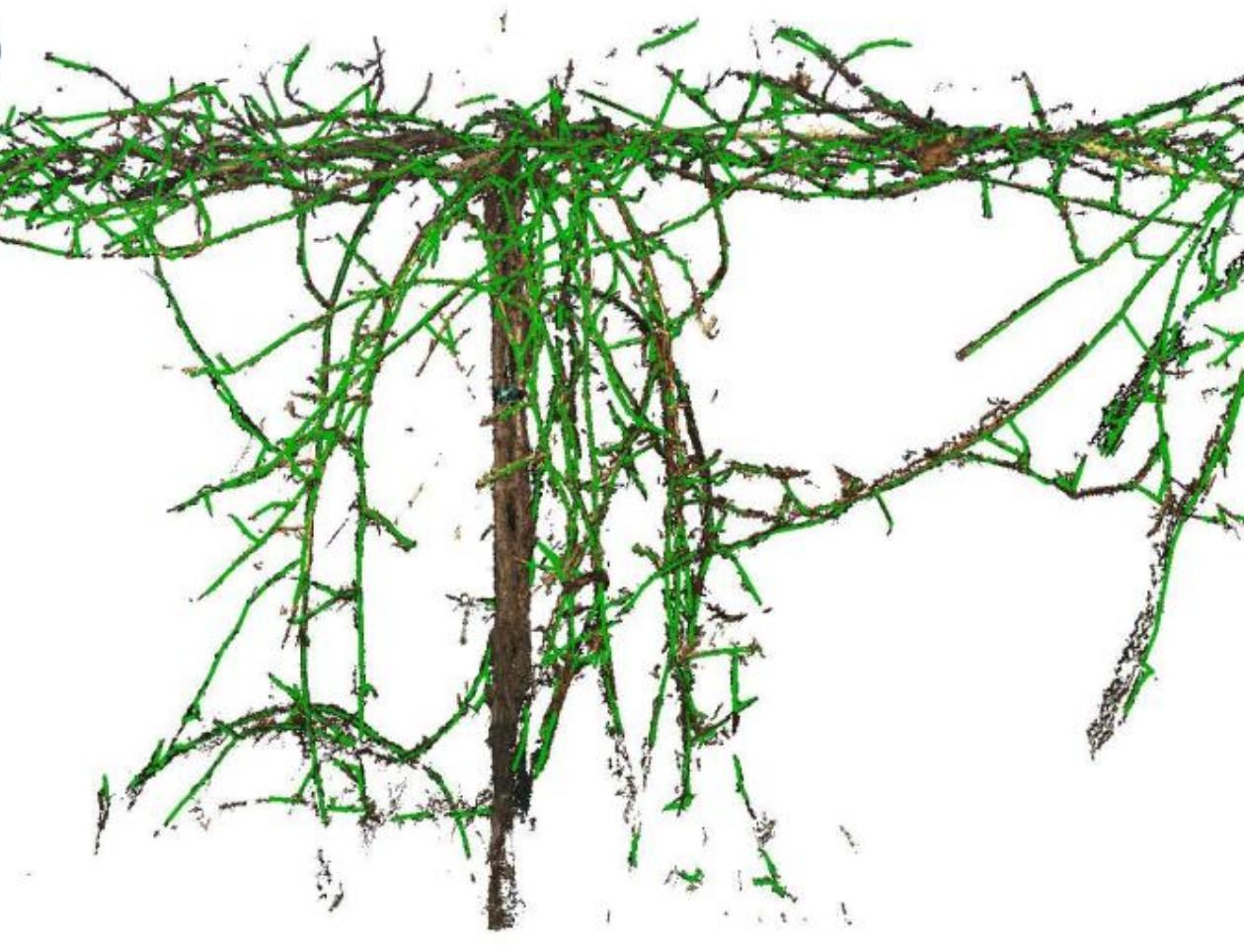 |
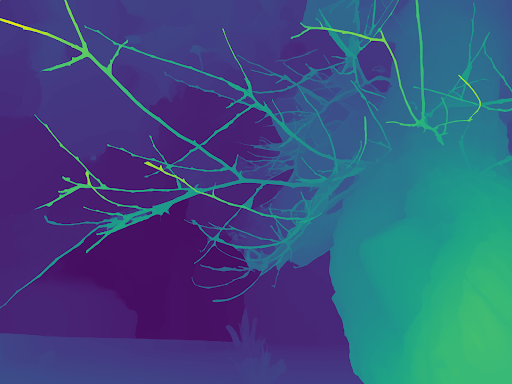
Skeletonization [IROS 2023] Decomposed stereo images of vines into skeletal models |
 |
Flash Stereo Explored using both flash and no-flash images in outdoor scenes |
 |
Florascope Idea for in-field high quality leaf images that was given some thought but not finished |
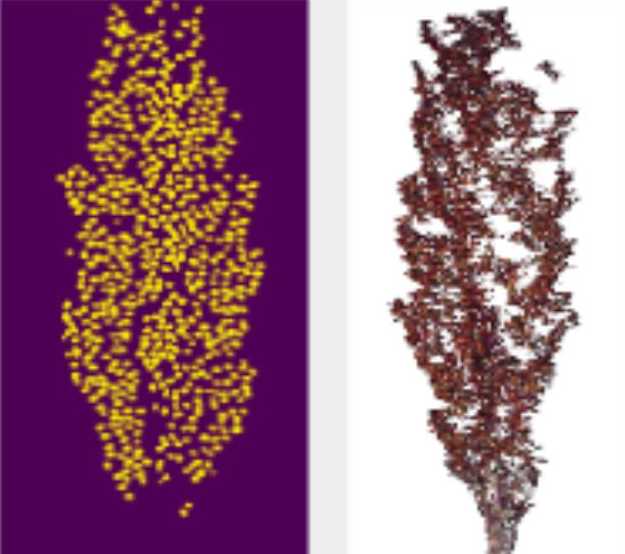 |
Sorghum Seed Counting [ICRA 2023] Computer vision project to count sorghum seeds from 360° stereo scans |
 |
RightHand Worked at this piece-picking startup for six years, from Applications Engineer to a Senior Software Engineer |
 |
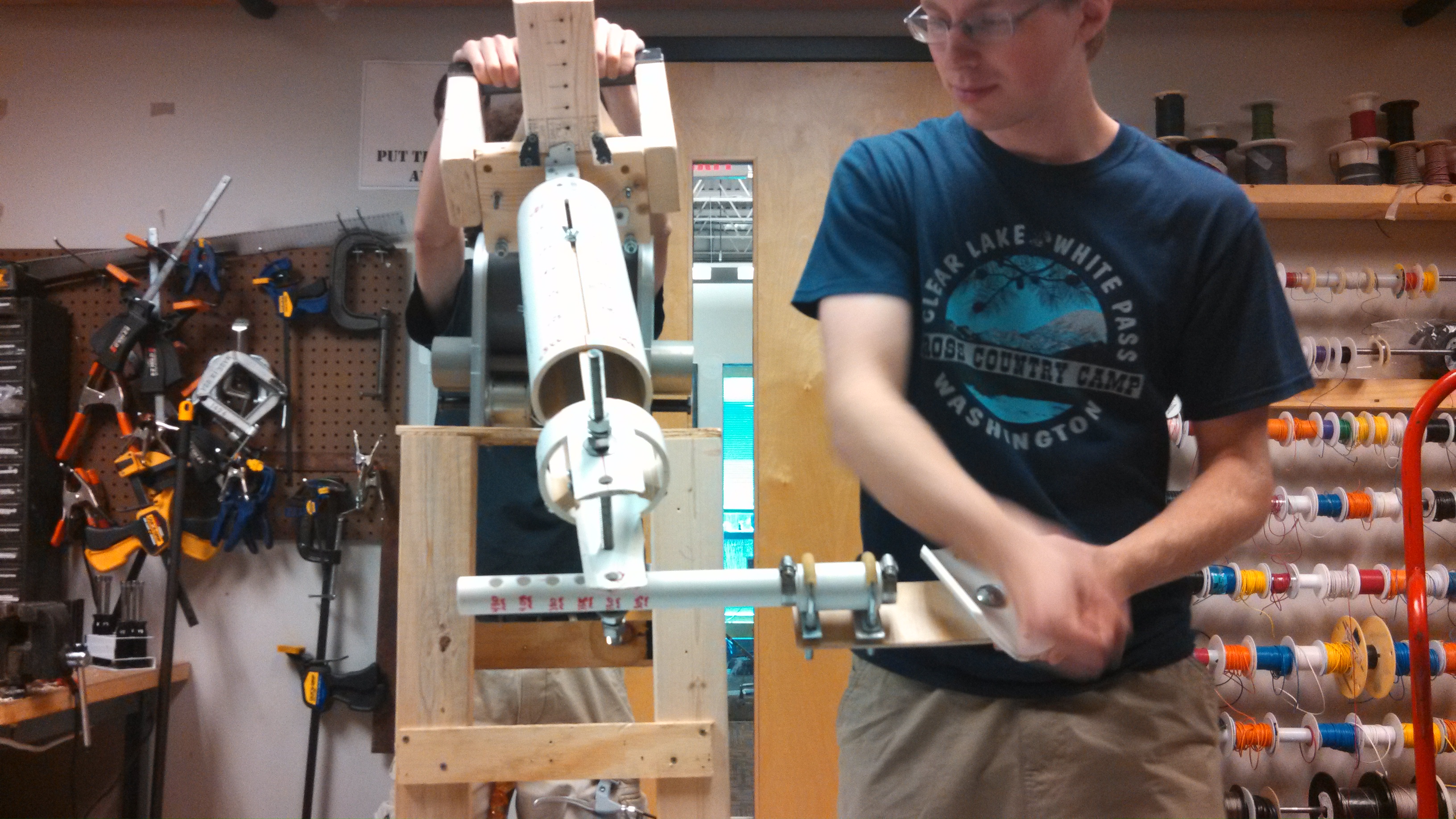
Weather Balloon Launched weather balloons across Massachusetts for some cool GoPro footage |
 |
Air Maze Made a 3D maze game out of the Bernoulli effect |
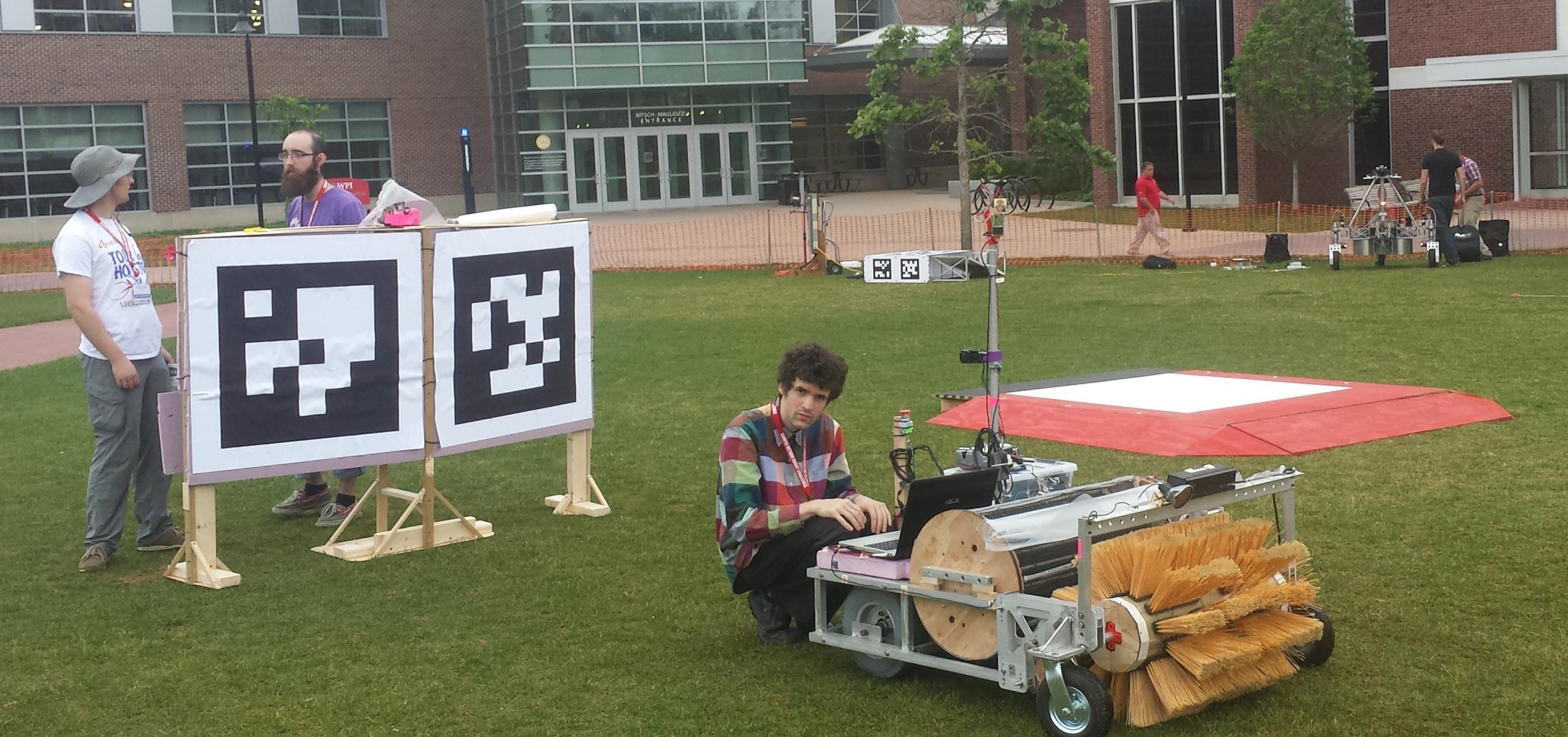 |
NASA Sample Challenge Constructed a robot for a NASA rover challenge at WPI |
 |
Sailbot Worked on making 2m autonomous sailboats |
 |
Quadcopter Control Capstone project to land quadcopters on a target board |
 |
Magnetic Levitation Made a device to electromagnetically levitate a nut |
 |
Barrett Technology Mechanical intern at Barrett, which makes tendon-driven robotic arms |
 |
Harvest Automation Quality engineering intern at Harvest, testing agricultural robots |
Interests
Other random interests include running, hiking, choir (shout-out to Revels), soccer, and fire arts (shout-out to Wildfire).
{kind=link}
{kind=link}
{kind=link}
{kind=link}
One fun suggestion - if you use git and have access to any large repositories with many contributors, do yourself a favor and run gource, then sit back and enjoy. This is a wonderful tool.